Ракетные двигатели
Содержание:
- Ядерный ракетный двигатель
- Электрический ракетный двигатель
- Краткие технические характеристики
- Что такое ракетный двигатель, и какие его виды существуют?
- Назначение
- Конструкция ракеты
- Классы реактивных двигателей:
- Полёт и результаты
- Устройство РД-107/108
- Системы наведения ракет
- Химический ракетный двигатель
- Испытания ПВРД
- Химические ракетные двигатели (ХРД)
- Жидкотопливные ракеты
- Электроника
Ядерный ракетный двигатель
Это один из вероятных аналогов для современных систем движения. В ядерном ракетном двигателе рабочее тело нагревается благодаря энергии, которая выделяется при радиоактивном распаде или термоядерном синтезе. Такие механизмы позволяют достигать значительного удельного импульса. А их общая тяга сравнима с этим показателем у химических двигателей. Но сколько типов механизмов на основе ядерной энергии различают? Всего 3:
- Радиоизотопные.
- Ядерные.
- Термоядерные.

Использование ядерных ракетных двигателей в атмосфере Земли довольно проблематично из-за радиационного загрязнения. Возможным решением этой проблемы станет газофазный тип.
Электрический ракетный двигатель
Этот тип имеет самый большой потенциал развития и использования в будущем. Электрические ракетные двигатели подают большие надежды. Так, их удельный импульс может достигать значений 210 км/с. Различают 3 типа двигателей:
- Электротермические.
- Электростатические (ионный ракетный двигатель, например).
- Электромагнитные.

Особенностью (про которую можно сказать, что она является и преимуществом, и недостатком) является то, что при увеличении удельного импульса необходимо меньше горючего, но больше энергии. С этой точки зрения неплохие шансы имеет ионный ракетный двигатель, который работает на газе. На данный момент он применяется на практике для корректировки траектории орбитальных станций и спутников. Ограниченность источников электроэнергии в космическом пространстве, а также проблемы с работоспособностью на высоте свыше 100 километров пока мешают их широкой эксплуатации. Большой потенциал использования имеют плазменные ракетные двигатели, в которых рабочее тело имеет состояние плазмы, но находящиеся пока только в стадии эксперимента.
Краткие технические характеристики
ЭРД характеризуются малым массовым расходом РТ и высокой скоростью истечения ускоренного потока частиц. Нижняя граница скорости истечения примерно совпадает с верхней границей скорости истечения струи и составляет около 3 000 м/с. Верхняя граница теоретически неограничена (в пределах скорости света), однако для перспективных моделей двигателей рассматривается скорость, не превышающая 200 000 м/с. В настоящее время для двигателей различных типов оптимальной считается скорость истечения от 16 000 до 60 000 м/с.
В связи с тем, что процесс ускорения в ЭРД проходит при низком давлении в ускорительном канале (концентрация частиц не превышает 1020 частиц/м³), плотность тяги довольно мала, что ограничивает применение ЭРД: внешнее давление не должно превышать давление в ускорительном канале, а ускорение КА очень мало (десятые или даже сотые g). Исключением из этого правила могут быть ЭДД на малых КА.
Электрическая мощность ЭРД колеблется от сотен ватт до мегаватт. Применяемые в настоящее время на КА ЭРД имеют мощность от 800 до 2 000 Вт.
ЭРД характеризуются КПД — от 30 до 60 %.
Что такое ракетный двигатель, и какие его виды существуют?
Под ракетным двигателем понимают механизм, в котором рабочее тело и источник энергии для работы расположены в самом средстве передвижения. Он является единственным средством вывода полезных грузов на орбиту Земли, а также может работать в безвоздушном космическом пространстве. Основная ставка сделана на преобразование потенциальной энергии топлива в кинетическую, которая используется в виде реактивной струи. Исходя из вида источника энергии различают химические, ядерные и электрические ракетные двигатели.

В качестве характеристики эффективности используется понятие удельного импульса (или тяги): отношение количества движения к расходу массы рабочего тела. Рассчитывается в м/с. Но даже если ракетные двигатели имеют значительный импульс, это не значит, что они используются. Почему так происходит, вы узнаете, прочитав о ядерном и электрическом механизмах.
Назначение
После выведения космического аппарата в космос его положение в пространстве нуждается в корректировке. На начальном этапе это может быть связано с необходимостью переведения аппарата на заданную орбиту или траекторию, а также с обеспечением максимальной освещенности солнечных батарей, направленности антенн и систем наблюдения. В дальнейшем могут проводиться орбитальные манёвры, связанные как с использованием аппарата по назначению, так и вызванные технической необходимостью, например, в случае уклонения от других объектов. Низкоорбитальные системы, кроме того, подвержены торможению атмосферой, из-за чего поддержание их орбиты в течение долгого времени требует наличия у аппарата двигательной установки. После исчерпания возможностей манёвра период активной жизни аппарата считается завершённым.
Задачей двигательной установки межпланетных аппаратов может являться разгон до второй космической скорости (иногда для этого используется последняя ступень ракеты-носителя). Корректировка траектории обычно осуществляется серией коротких запусков двигателя, между которыми аппарат находится в свободном полете. Наиболее эффективным способом перемещения космического аппарата с одной круговой орбиты на другую является эллиптическая переходная орбита, касательная к обеим круговым. Для её формирования на начальном участке используется серия ускорений, а на конечном — серия торможений, остальное время аппарат перемещается по инерции. Иногда для торможения используются особые методы — например, за счёт аэродинамического сопротивления атмосферы планеты.
Рисунок солнечного паруса
Некоторые типы двигательных установок, например, электроракетные двигатели или солнечный парус, обеспечивают малое приращение скорости при длительном действии. В этом случае траектория межпланетного аппарата будет иной: постоянное ускорение в первой части пути и постоянное торможение во второй. Солнечный парус в качестве движителя был успешно испытан на японском аппарате «IKAROS».
Для межзвездных перелётов также требуются свои двигательные установки. В настоящее время таких устройств не существует, но ведётся обсуждение их возможных вариантов. Расстояние до ближайших к Солнцу звёзд чрезвычайно велико, и достижение цели за приемлемое время требует высокой скорости полёта. Разгон и торможение межзвёздного корабля является непростой задачей для конструкторов.
Конструкция ракеты
Конструкции большинства ракет в основном схожи между собой. Они удовлетворяют в большинстве случаев, так скажем, идеальной «эмпирической ракете»:
-
длина ракеты полная: L= 15~25 D
-
длина головного обтекателя: Ln = 2.5~3.5*D
-
размах стабилизатора: S = 1~2*D
-
общая площадь стабилизаторов: F= 0,7~0,8*A,где A=L*D — площадь продольного сечения корпуса,
-
запас устойчивости: k = 1,5~3*D
«Эмпирическая ракета» Rocki
В зависимости от поставленных целей и используемых компонентов параметры ракеты могут варьироваться, конечно же, но почти всегда укладываются в вышеобозначенные границы. В моём случае размер ракеты будет определяться исходя из размеров двигателя, парашюта и электроники. Чтобы уместить всё в корпусе ракеты я использую трубу диаметром в 50мм. Трубу можно сделать, в идеале, из стеклопластика, а можно взять ПП канализационную трубу — она сравнительно прочная и лёгкая. Головной обтекатель также делается из этой же трубы — вырезается «корона» (длиной в 2-3 диаметра ракеты) и склеивается вместе, образуя параболическую форму. Хотя, конечно есть и другие варианты — выточить обтекатель из деревянной заготовки на токарном станке или распечатать его на 3D-принтере. Обтекатель должен быть максимально правильной формы, гладким — это необходимо для снижения аэродинамического сопротивления ракеты и снижения вредных срывных течений в носовой части ракеты.

Стабилизаторы стоит изготавливать из достаточно лёгкого, но прочного материала. Например пластика, фанеры или бальзы. Форма и размер стабилизаторов зависят от размеров ракеты, а если быть точным, то от расположения центра тяжести ракеты и центра давления.
Модель устойчивости ракеты Проверка стабильности ракеты — просто раскручиваем ракету над головой
Проверка стабильности ракеты — просто раскручиваем ракету над головой
Центр тяжести ракеты определяется простым методом «взвешивания». Положив ракету на руку, нужно найти точку, в которой достигается равновесие.

Центр давления рассчитывается используя метод определения центра давления по Борроумену. К слову сказать, есть и другой, хотя и куда менее точный способ определения центра давления — метод аэродинамической проекции. В любом случае, какой бы мы метод не использовали, чтобы ракета была устойчивой, расстояние между центром тяжести и центром давления должно составлять хотя бы 1,5 диаметра самой ракеты. Эта, так называемая «устойчивость в диаметрах» может быть и выше, хотя устойчивость больше 2-2,5 диаметров не рекомендуется, так как в этом случае стабилизаторы будут больше, а значит тяжелее. Кроме того, большая площадь стабилизаторов приведёт к тому, что ракета будет испытывать большие боковые нагрузки, что приведёт к тому, что она будет, как флюгер разворачиваться по ветру и лететь не вверх, а вбок; в худшем случае — флаттер приведёт к разрушению ракеты в полёте. Подробно об устойчивости можно почитать здесь.
 Интерфейс Rocki-design и модель будущей ракеты
Интерфейс Rocki-design и модель будущей ракеты
Есть готовые программные решения для расчёта параметров ракеты. Я использую Rocki-design, но чаще, тем более в англоязычном мире используют OpenRocket. Подобрав нужный размер стабилизаторов, вырезаем их из заготовки и прикручиваем винтами к корпусу, используя металлические уголки. Крепление должно быть жёстким. Для лёгких ракет сгодится и просто приклеивание, но для тяжелой ракеты лучше перестраховаться.

Классы реактивных двигателей:
Все реактивные двигатели подразделяют на 2 класса:
- Воздушно-реактивные – тепловые двигатели, использующие энергию окисления воздуха, получаемого из атмосферы. В этих двигателях рабочее тело представлено смесью продуктов горения с остальными элементами отобранного воздуха.
- Ракетные – двигатели, которые на борту содержат все необходимые компоненты и способны работать даже в безвоздушном пространстве.
Прямоточный воздушно-реактивный двигатель – самый простой в классе ВРД по конструкции. Требуемое для работы устройства повышение давления образуется путем торможения встречного воздушного потока.

Рабочий процесс ПВРД можно кратко описать следующим образом:
Во входное устройство двигателя поступает воздух со скоростью полета, кинетическая его энергия преобразуется во внутреннюю, давление и температура воздуха повышаются. На входе в камеру сгорания и по всей длине проточной части наблюдается максимальное давление.
- Нагревание сжатого воздуха в камере сгорания происходит путем окисления подаваемого воздуха, при этом внутренняя энергия рабочего тела увеличивается.
- Далее поток сужается в сопле, рабочее тело достигает звуковой скорости, а вновь при расширении – сверхзвуковой. За счет того, что рабочее тело движется со скоростью, превышающей скорость встречного потока, внутри создается реактивная тяга.
В конструктивном плане ПВРД является предельно простым устройством. В составе двигателя есть камера сгорания, внутрь которой горючее поступает из топливных форсунок, а воздух – из диффузора. Камера сгорания заканчивается входом в сопло, которое является суживающейся-расширяющимся.
Развитие технологии смесевого твердого топлива повлекло за собой использование этого горючего в ПВРД. В камере сгорания располагается топливная шашка с центральным продольным каналом. Проходя по каналу, рабочее тело постепенно окисляет поверхность топлива и нагревается само. Применение твердого горючего еще более упрощает состоящую конструкцию двигателя: топливная система становится ненужной.
Смесевое топливо по своему составу в ПВРД отличается от применяемого в РДТТ. Если в ракетном двигателе большую часть состава топлива занимает окислитель, то в ПВРД он используется в небольших пропорциях для активирования процесса горения.
Наполнитель смесевого топлива ПВРД преимущественно состоит из мелкодисперсного порошка бериллия, магния или алюминия. Их теплота окисления существенно превосходит теплоту сгорания углеводородного горючего. В качестве примера твердотопливного ПВРД можно привести маршевый двигатель крылатой противокорабельной ракеты «П-270 Москит».

Тяга ПВРД зависит от скорости полета и определяется исходя из влияния нескольких факторов:
- Чем больше показатель скорости полета, тем большим будет расход воздуха, проходящего через тракт двигателя, соответственно, большее количество кислорода будет проникать в камеру сгорания, что увеличивает расход топлива, тепловую и механическую мощность мотора.
- Чем больше расход воздуха сквозь тракт двигателя, тем выше будет создаваемая мотором тяга. Однако существует некий предел, расход воздуха сквозь тракт мотора не может увеличиваться неограниченно.
- При возрастании скорости полета увеличивается уровень давления в камере сгорания. Вследствие этого увеличивается термический КПД двигателя.
- Чем больше разница между скоростью полета аппарата и скоростью прохождения реактивной струи, тем больше тяга двигателя.
Зависимость тяги прямоточного воздушно-реактивного двигателя от скорости полета можно представить следующим образом: до того момента, пока скорость полета намного ниже скорости прохождения реактивной струи, тяга будет увеличиваться вместе с ростом скорости полета. Когда скорость полета приближается к скорости реактивной струи, тяга начинает падать, миновав определенный максимум, при котором наблюдается оптимальная скорость полета.
В зависимости от скорости полета выделяют такие категории ПВРД:
- дозвуковые;
- сверхзвуковые;
- гиперзвуковые.

Каждая из групп имеет свои отличительные особенности конструкции.
Полёт и результаты
Характеристики собранной ракеты:
-
Длина: 1300 миллиметров
-
Диаметр: 50 миллиметров
-
Масса корпуса (со всеми компонентами): 1000 грамм
-
Масса электроники: 180 грамм
-
Масса двигателя: 440 грамм
-
Масса полная: 1620 грамм
-
Двигатель: ДКР-30-9-280-ПЭ(С)
-
Класс: H115, максимальная тяга — 180 Н*с
-
Расчётный (максимальный) апогей: 530 метров
-
Время до апогея: 11,5 секунд
 Взлёт ракеты
Взлёт ракеты
Полёт в целом получился успешным, ракета достигла апогея в 400 метров.

Ракета села с парашютом в 200 метрах от места старта.
 Парашют раскрылся!
Парашют раскрылся!
Любопытно, что на данных с акселерометра видны всплески, соответствующие работе системы спасения (мортирки).
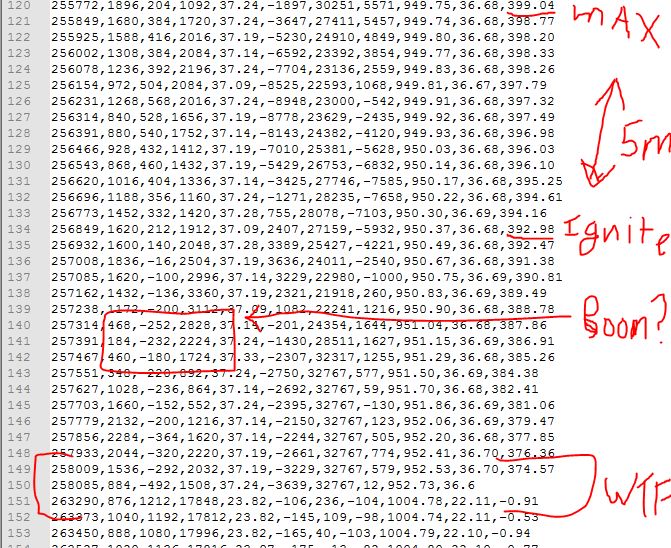 Сырые данные с логгера
Сырые данные с логгера
Устройство РД-107/108
Двигатель РД-107/108 состоит из четырех камер сгорания, турбонасосного агрегата, газогенератора, испарителя азота для наддува баков ракеты и комплекта агрегатов автоматики. Для управления полетом ракеты на двигателях имеются рулевые камеры: два на РД-107 и четыре на РД-108.
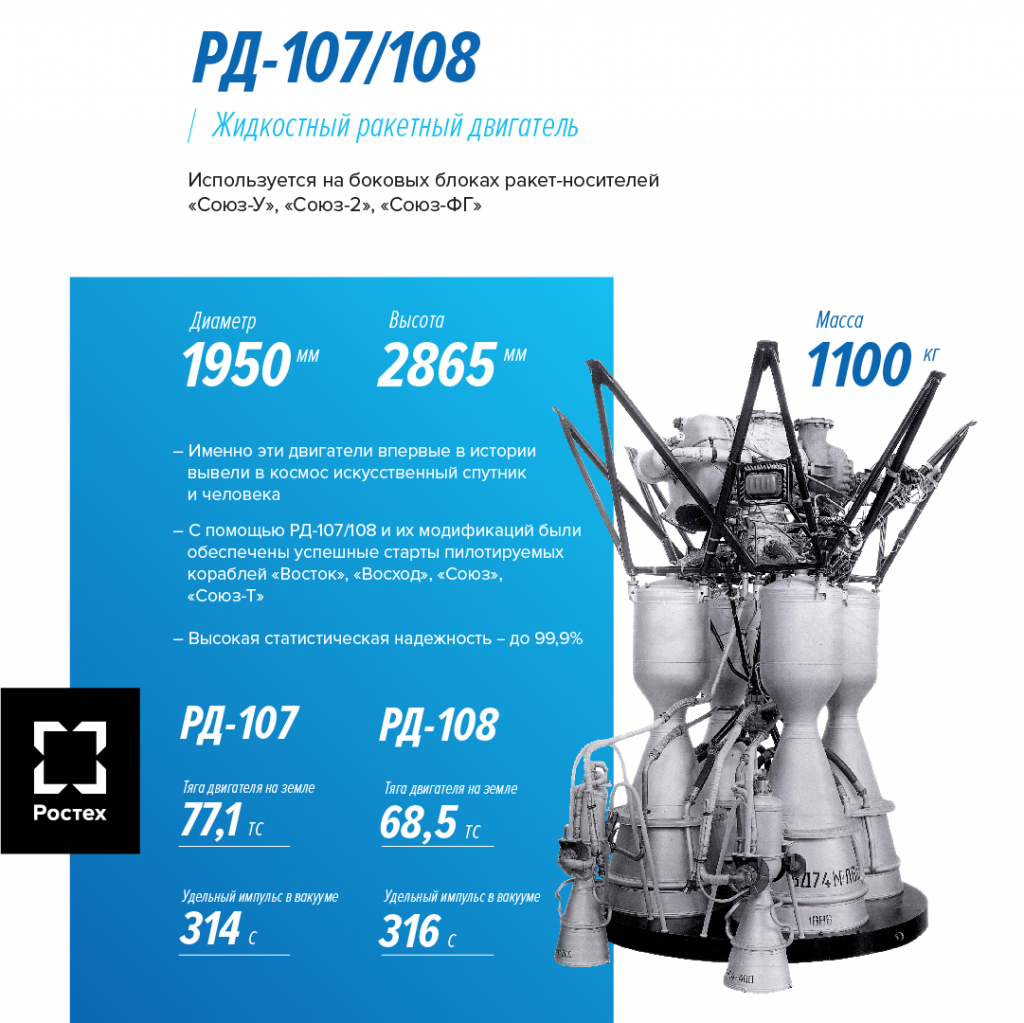
Несоизмеримые с возможностями существующих металлов температуры горения и продуктов сгорания, большое количество выделяемого тепла требуют охлаждения стенок камеры сгорания и сопла. В РД-107/108 эта инженерная задача решается двухстеночной конструкцией камеры сгорания и сопла и организацией охлаждения стенки со стороны горячего тракта подачей горючего (керосина) в камеру сгорания через межстеночные пространства.
Вторая особенность РД-107/108 − открытая схема сброса генераторного газа. Окислитель и горючее хранятся в отдельных баках и подаются в систему с помощью турбонасосного агрегата (ТНА). Для привода насосов горючего и окислителя используется турбина, в качестве рабочего тела для которой используется парогаз – продукт каталитического разложения пероксида водорода. Выхлопы турбины выбрасываются за срез сопла.
Системы наведения ракет
В наше время почти все ракеты имеют систему наведения. Думаю, не стоит объяснять, что попасть по цели, которая находится на расстоянии сотен или тысяч километров, без точной системы наведения просто невозможно.
Систем наведения и их комбинаций очень много. Только среди основных можно отметить систему командного наведения, электродистанционное наведение, наведение по наземным ориентирам, геофизическое наведение, наведение по лучу, спутниковое наведение, а также некоторые другие системы и их сочетание.

Ракета с системой наведения под крылом самолета.
Система электродистанционного наведения имеет много общего с системой на радиоуправлении, но она обладает более высокой устойчивостью к помехам, в том числе, намеренно создаваемым противником. В случае такого управления команды передаются по проводу, который направляет в ракету все данные, необходимые для поражения цели. Передача таким способом возможна только до момента запуска.
Система наведения по наземным ориентирам состоит из высокочувствительных высотомеров, позволяющих отслеживать положение ракеты на местности и ее рельеф. Такая система применяется исключительно в крылатых ракетах ввиду их особенностей, о которых мы поговорим чуть ниже.
Система геофизического наведения основана на постоянном сопоставлении угла положения ракеты относительно горизонта и звезд с эталонными значениями, заложенными в нее перед стартом. Внутренняя система управления при малейшем отклонении возвращает ракету на курс.
При наведении по лучу ракете нужен вспомогательный источник целеуказания. Как правило, им является корабль или самолет. Внешний радар определяет цель и производит ее отслеживание, если она движется. Ракета ориентируется на этот сигнал и сама наводится на него.
Название системы спутникового наведения говорит само за себя. Наведение на цель производится по координатам системы глобального позиционирования. В основном такая система широко используется в тяжелых межконтинентальных ракетах, которые наводятся на статичные наземные цели.
Кроме приведенных примеров, есть также системы лазерного, инерциального, радиочастотного наведения и другие. Также командное управление может обеспечивать связь между командным пунктом и системой наведения. Это позволит изменить цель или вовсе отменить удар уже после запуска.
Благодаря такому широкому перечню систем наведения, современные ракеты могут не только взорвать что угодно и где угодно, но и обеспечить точность, которая иногда исчисляется десятками сантиметров.
Химический ракетный двигатель
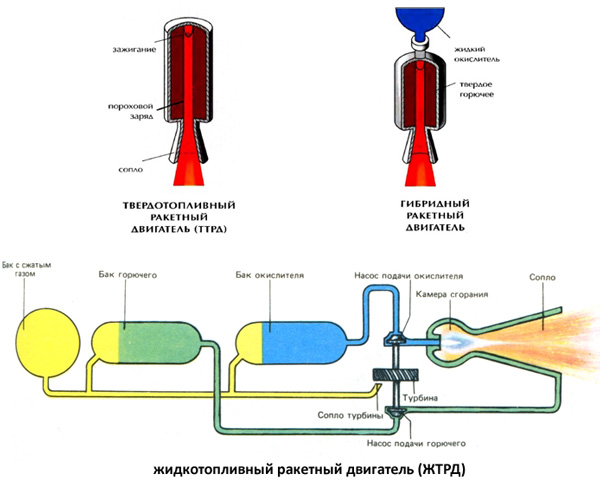
В их основе находится химическая реакция, в которую вступают горючее и окислитель. Во время реакции продукты сгорания нагреваются до значительных температур, при этом они расширяются и разгоняются в соплах, чтобы затем покинуть двигатель. Тепло, выделяемое таким двигателем, используется на расширение рабочего тела, имеющего газообразный вид. Существует два типа механизмов такого типа.
Твердотопливные двигатели имеют простую конструкцию, они дешевы в изготовлении и не требуют значительных затрат на хранение и подготовку к эксплуатации. Это обуславливает их надёжность и желанность в использовании. Но одновременно такой тип имеет существенный недостаток – очень высокий расход топлива. Также оно состоит здесь из смеси горючего и окислителя. Более эффективным, но одновременно и сложным является жидкостный ракетный двигатель. В нём горючее и окислитель находятся в разных резервуарах и дозированно подаются в сопло. Важным преимуществом является то, что можно регулировать уровень подачи и, соответственно, скорость космического корабля. Несмотря на то что такие ракетные двигатели обладают невысоким удельным импульсом, они развивают сильную тягу. Такое их свойство привело к тому, что сейчас на практике используются исключительно они.
Испытания ПВРД
В конце апреля 1944 года в тесном сотрудничестве НИИ авиации в Брауншвейге и научно-исследовательский институт аэродинамики (Aerodynamischen Versuchsanstalt) в Геттингене начали совместные исследования моделей. Целью этих исследований было установление окончательной формы силовой установки, а также конструкторские работы по созданию оптимальных форсунок и испарителя.
Конфигурация корпуса (трубы) силовой установки, соответствующая последним результатам аэродинамических исследований, была окончательно определена в середине июля 1944 года, а в конце месяца на заводе компании Focke-Wulf в Бад-Айльзене (Bad Eilsen) завершилось изготовление двух опытных образцов (Рис. 2).

Рис. 2. Форма силовой установки, подобранная после завершения испытаний в научно-исследовательском институте аэродинамики, Геттинген
Однако следующий шаг, предложенный доктором Пабстом – провести лётные испытания для изучения влияния ПВРД на летные характеристики и поведение самолета в воздухе – так и не был сделан. Хотя конструкторская документация по установке корпусов опытных ПВРД на законцовках крыла истребителя FW 190 была полностью разработана, испытания не состоялись из-за отказа поставить самолет для этих целей (Рис. 3).

Рис. 3. Схема размещения ПВРД на законцовках крыла истребителя FW 190A-10
Насколько быстро шла разработка корпуса ПВРД, настолько же проблемным оказалось создание работоспособного испарителя, в котором должно было испаряться тяжелое высококипящее топливо (каменноугольное масло ). Уже при первых принципиальных отработках возникли значительные проблемы с подачей необходимого количества топлива, которое должно было поступать в камеру сгорания в виде паров, со смесеобразованием, с регулировкой подачи топлива, установлением необходимого количества подаваемого топлива и поддержанием фронта пламени.
Сначала в компании Focke-Wulf рассчитывали завершить разработки в течение четырех месяцев, но вскоре стало понятно, что эти сроки иллюзорны и нереальны. В результате инженеры компании сконцентрировались на разработке камеры сгорания, которая могла бы работать без испарителя топлива.
В середине августа 1944 года была представлена первая работоспособная модель ПВРД. Эту силовую установку направили в Брауншвейгский НИИ авиации. Однако несмотря на то, что руководитель группы разработок (Chef der Amtsgruppe «Entwicklung») технического отдела подполковник Кнемайер (Oberstleutnant Knemeyer) в письме напомнил о необходимости провести испытания как можно быстрее, эти испытания камеры сгорания не были начаты. На это была серьезная причина: незадолго перед изготовлением первого работоспособного образца ПВРД бомбардировщики союзников нанесли удар по химическому комбинату Leuna-Werke, производившему необходимый для испытаний пропан. Завод был серьёзно поврежден и о быстром восстановлении производства пропана на нем не могло быть и речи.
После этого в середине сентября доктор Пабст предложил проводить испытания, используя в качестве топлива водород. Монтаж двухсот баллонов с водородом в испытательном центре Люфтваффе в Ораниенбурге (Oranienburg) растянулся на месяцы. Только в конце января 1945 года, когда было установлено всё необходимое для выполнения измерений оборудование и проведена сборка силовой установки, были выполнены измерения сопротивления обшивки неработающего ПВРД. В середине февраля стало возможным производить измерения величины тяги работающей силовой установки. При расходе воздуха 0,705 кг/с скорость газов на выходе из сопла составляла 352 м/с, что соответствовало расчетным данным. (Рис. 4).

Рис. 4. ПВРД, разработанный компанией Focke-Wulf
В декабре 1944 года по заказу верховного командования ВВС (степень срочности «DE») предусматривалось изготовить четыре предсерийных прямоточных воздушно-реактивных двигателя, которые можно было бы использовать на самолётах. Исследования в рамках этого заказа должны были вестись до конца августа 1945 года, но после того как войска противника заняли Брауншвейг и Бад-Айльзен, эти испытания прекратились.
Позднее, когда между союзниками по Антигитлеровской коалиции возникли разногласия, исследования, проводившиеся под руководством доктора Цобеля и доктора Пабста, были внимательно изучены. Союзники оценили их как новаторские и значительные. Согласно рассекреченным документам эти результаты использовались американскими и английскими научно-исследовательским институтами в качестве основы для ведущихся ими исследований. Захваченные союзниками материалы стали открыто публиковать только в 1955 году.
Химические ракетные двигатели (ХРД)
Этот тип двигателей на сегодняшний день является единственным, который массово используется для выведения в открытый космос космических аппаратов, кроме того, он нашел применение и в военной промышленности. Химические двигатели делятся на твердо- и жидкотопливные в зависимости от агрегатного состояния ракетного топлива.
Виды химических двигателей
История создания
Первыми ракетными двигателями были твердотопливные, а появились они несколько веков назад в Китае. С космосом их тогда мало что связывало, зато с их помощью можно было запускать военные ракеты. В качестве топлива использовался порошок, по составу напоминающий порох, только процентное соотношение его составляющих было изменено. В результате при окислении порошок не взрывался, а постепенно сгорал, выделяя тепло и создавая реактивную тягу. Такие двигатели с переменным успехом дорабатывались, совершенствовались и улучшались, но их удельный импульс все равно оставался малым, то есть конструкция была неэффективной и неэкономичной. Вскоре появились новые виды твердого топлива, позволяющие получить больший удельный импульс и развивать большую тягу. Над его созданием в первой половине ХХ века трудились ученые СССР, США и Европы. Уже во второй половине 40-х годов был разработан прототип современного топлива, используемого и сейчас.

Ракетный двигатель РД — 170 работает на жидком топливе и окислителе.
Жидкостные ракетные двигатели – это изобретение К.Э. Циолковского, который предложил их в качестве силового агрегата космической ракеты в 1903 году. В 20-х годах работы по созданию ЖРД начали проводиться в США, в 30-хх годах – в СССР. Уже к началу Второй мировой войны были созданы первые экспериментальные образцы, а после ее окончания ЖРД стали выпускаться серийно. Использовались они в военной промышленности для оснащения баллистических ракет. В 1957 году впервые в истории человечества был запущен советский искусственный спутник. Для его запуска использовалась ракета, оснащенная РЖД.
Устройство и принцип работы химических ракетных двигателей
Твердотопливный двигатель вмещает в своем корпусе топливо и окислитель в твердом агрегатном состоянии, причем контейнер с топливом – это одновременно и камера сгорания. Топливо обычно имеет форму стержня с центральным отверстием. В процессе окисления стержень начинает сгорать от центра к периферии, а газы, полученные в результате сгорания, выходят через сопло, образуя тягу. Это самая простая конструкция среди всех ракетных двигателей.
В жидкостных РД топливо и окислитель находятся в жидком агрегатном состоянии в двух раздельных резервуарах. По каналам подачи они попадают в камеру сгорания, где смешиваются и происходит процесс горения. Продукты сгорания выходят через сопло, образуя тягу. В качестве окислителя обычно используется жидкий кислород, а топливо может быть разным: керосин, жидкий водород и т.д.
Недостатки РДТТ:
- ограничение по времени работы: топливо сгорает очень быстро;
- невозможность перезапуска двигателя, его остановки и регулирования тяги;
- небольшой удельный вес в пределах 2000-3000 м/с.
Анализируя плюсы и минусы РДТТ, можно сделать вывод, что их использование оправдано только в тех случаях, когда нужен силовой агрегат средней мощности, достаточно дешевый и простой в исполнении. Сфера их использования – баллистические, метеорологические ракеты, ПЗРК, а также боковые ускорители космических ракет (ими оснащаются американские ракеты, в советских и российских ракетах их не использовали).
Достоинства жидкостных РД:
- высокий показатель удельного импульса (порядка 4500 м/с и выше);
- возможность регулирования тяги, остановки и перезапуска двигателя;
- меньший вес и компактность, что дает возможность выводить на орбиту даже большие многотонные грузы.
Недостатки ЖРД:
- сложная конструкция и пуско-наладочные работы;
- в условиях невесомости жидкости в баках могут хаотично перемещаться. Для их осаждения нужно использовать дополнительные источники энергии.
Сфера применения ЖРД – это в основном космонавтика, так как для военных целей эти двигатели слишком дорогие.
Несмотря на то, что пока химические РД – единственные способные обеспечить вывод ракет в открытый космос, их дальнейшее усовершенствование практически невозможно. Ученые и конструкторы убеждены, что предел их возможностей уже достигнут, а для получения более мощных агрегатов с большим удельным импульсом необходимы другие источники энергии.
Жидкотопливные ракеты
Роберт Годдард в 1925 году испытал первый двигатель, работающий на жидком топливе. Его двигатель использовал для работы жидкий кислород и бензин. Также он стремился решить многие фундаментальные проблемы в конструкции двигателя ракеты, включая стратегии охлаждения, механизмы накачки и рулевые механизмы. Такие проблемы делают ракеты с жидким топливом столь сложными. Все это ему успешно удалось.
Главная идея максимально проста. В большинстве жидкотопливных ракетных двигателях окислитель и топливо (к примеру, жидкий кислород и бензин закачиваются в камеру сгорания). Там они сгорают, создавая поток горячих газов с высоким давлением и скоростью. Эти газы проходят через специальное сопло, которое делают их скорость еще большей (от 8 тыс. до 16 тыс. километров в час), а затем выходят. Ниже приведена простая схема, демонстрирующая этот процесс наглядно.

На схеме видно сложности обычного ракетного двигателя. Например, нормальное топливо – это холодный жидкий газ по типу жидкого кислорода или жидкого водорода. Но одной из серьезных проблем подобного двигателя является охлаждение сопла и камеры сгорания, поэтому сначала холодная жидкость циркулирует вокруг перегретых частей, дабы их охладить. Насосы должны генерировать высокое давление, чтобы преодолеть давление в камере сгорания, сжигаемой топливом. Это охлаждение и подкачка делает ракетный двигатель схожим на неудачную попытку сантехнической самореализации. Теперь рассмотрим все варианты комбинации топлива, которые применяется в жидкотопливных двигателях ракет:
- жидкий кислород и жидкий водород (главные двигатели космических шаттлов);
- жидкий кислород и бензин (первые ракеты Годдарда);
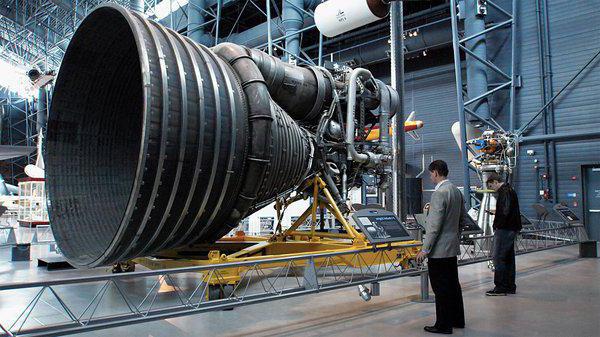
- жидкий кислород и керосин (применялись в программе «Аполлон» в 1 ступени «Сатурна-5»);
- жидкий кислород и спирт (применялись ракетах V2 немецкого производства);
- четырехокись азота/монометилгидразин (применялись в двигателях «Кассини»).
Электроника
В качестве бортового компьютера я использую собственную схему, в основе которой находится Arduino Nano.
Схема полётного компьютера
Компоненты:
-
Барометр BMP180
-
Гироскоп-акселерометр MPU6050
-
Пищалка
-
microSD модуль
-
Реле\MOSFET для активации запала мортирки
-
2 шт. 18650 аккумуляторов
-
LM7805 для понижения напряжения для контроллера
-
Мини-тумблер для включения компьютера
-
Разъем JST-2P для соединения с запалом мортирки
При запуске компьютера инициализируются все датчики и модули, записывается текущая высота, подаётся звуковой сигнал перехода в режим ожидания старта. Моментом старта считается случай изменения высоты на пороговое значение (например 5 метров).
В момент старта фиксируется (записывается время), далее на карту начинают записываться данные с датчиков. В процессе полёта отслеживается апогей — записывается текущая высота, если она меньше предыдущей. Если текущая высота падает на пороговое значение, то зажигаем вышибной заряд.
Момент приземления не вычисляется, просто считаем, что через две минуты ракета должна сесть на землю. Через две минуты останавливается запись на карту и начинается подача звуковых сигналов для облегчения поиска ракеты.
Полный скетч можно найти тут.

