Прямоточный воздушно-реактивный двигатель
Содержание:
- Устройство
- История[править | править код]
- Из истории развития реактивных двигателей
- Преимущества и недостатки
- Устройство и принцип работы турбовинтового двигателя
- Область применения[править | править код]
- Испытания ПВРД
- Основной этап
- Классы реактивных двигателей:
- Сверхзвуковые ПВРД
- Применение
- Отклоняемый вектор тяги
Устройство
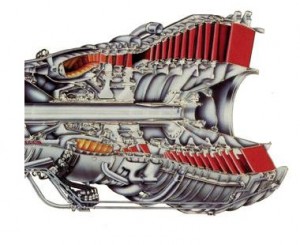
Первый контур вмещает в себя компрессоры высокого и низкого давления, камеру сгорания, турбины высокого и низкого давления и сопло. Второй контур состоит из направляющего аппарата и сопла. Такая конструкция является базовой, но возможны и некоторые отклонения, например, потоки внутреннего и внешнего контура могут смешиваться и выходить через общее сопло, или же двигатель может оснащаться форсажной камерой.
Теперь коротко о каждом составляющем элементе ТРДД. Компрессор высокого давления (КВД) – это вал, на котором закреплены подвижные и неподвижные лопатки, формирующие ступень. Подвижные лопатки при вращении захватывают поток воздуха, сжимают его и направляют внутрь корпуса. Воздух попадает на неподвижные лопатки, тормозится и дополнительно сжимается, что повышает его давление и придает ему осевой вектор движения. Таких ступеней в компрессоре несколько, а от их количества напрямую зависит степень сжатия двигателя. Такая же конструкция и у компрессора низкого давления (КНД), который расположен перед КВД. Отличие между ними заключается только в размерах: у КНД лопатки имеют больший диаметр, перекрывающий собой сечение и первого и второго контура, и меньшее количество ступеней ( от 1 до 5).
В камере сгорания сжатый и нагретый воздух перемешивается с топливом, которое впрыскивается форсунками, а полученный топливный заряд воспламеняется и сгорает, образуя газы с большим количеством энергии. Камера сгорания может быть одна, кольцевая, или же выполняться из нескольких труб.
Турбина по своей конструкции напоминает осевой компрессор: те же неподвижные и подвижные лопатки на валу, только их последовательность изменена. Сначала расширенные газы попадают на неподвижные лопатки, выравнивающие их движение, а потом на подвижные, которые вращают вал турбины. В ТРДД турбин две: одна приводит в движение компрессор высокого давления, а вторая – компрессор низкого давления. Работают они независимо и между собой механически не связаны. Вал привода КНД обычно расположен внутри вала привода КВД.
Сопло – это сужающаяся труба, через которую выходят наружу отработанные газы в виде реактивного потока. Обычно каждый контур имеет свое сопло, но бывает и так, что реактивные потоки на выходе попадают в общую камеру смешения.
Внешний, или второй, контур – это полая кольцевая конструкция с направляющим аппаратом, через которую проходит воздух, предварительно сжатый компрессором низкого давления, минуя камеру сгорания и турбины. Этот поток воздуха, попадая на неподвижные лопасти направляющего аппарата, выравнивается и движется к соплу, создавая дополнительную тягу за счет одного только сжатия КНД без сжигания топлива.
Форсажная камера – это труба, размещенная между турбиной низкого давления и соплом. Внутри у нее установлены завихрители и топливные форсунки с воспламенителями. Форсажная камера дает возможность создания дополнительной тяги за счет сжигания топлива не в камере сгорания, а на выходе турбины. Отработанные газы после прохождения ТНД и ТВД имеют высокую температуру и давления, а также значительное количество несгоревшего кислорода, поступившего из второго контура. Через форсунки, установленные в камере, подается топливо, которое смешивается с газами, и воспламеняется. В результате тяга на выходе возрастает порой в два раза, правда, и расход топлива при этом тоже растет. ТРДД, оснащенные форсажной камерой, легко узнать по пламени, которое вырывается из их сопла во время полета или при запуске.
форсажная камера в разрезе, на рисунке видны завихрители.
Самым важным параметром ТРДД является степень двухконтурности (к) – отношение количества воздуха, прошедшего через второй контур, к количеству воздуха, прошедшего через первый. Чем выше этот показатель, тем более экономичным будет двигатель. В зависимости от степени двухконтурности можно выделить основные виды двухконтурных турбореактивных двигателей. Если его значение к<2, это обычный ТРДД, если же к>2, то такие двигатели называются турбовентиляторными (ТВРД). Есть также турбовинтовентиляторные моторы, у которых значение достигает и 50-ти, и даже больше.
В зависимости от типа отведения отработанных газов различают ТРДД без смешения потоков и с ним. В первом случае каждый контур имеет свое сопло, во втором газы на выходе попадают в общую камеру смешения и только потом выходят наружу, образуя реактивную тягу. Двигатели со смешением потоков, которые устанавливаются на сверхзвуковые самолеты, могут снабжаться форсажной камерой, которая позволяет увеличивать мощность тяги даже на сверхзвуковых скоростях, когда тяга второго контура практически не играет роли.
История[править | править код]
Leduc 0.10 — первый пилотируемый аппарат с маршевым ПВРД (первый полёт — 19 ноября 1946). Музей авиации и космонавтики в Ле-Бурже
В 1913 году француз Рене Лорин получил патент на прямоточный воздушно-реактивный двигатель.
ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-х годах с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор Рене Ледюк получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт пилотируемого аппарата с маршевым ПВРД, Leduc 0.10. Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые Leduc 0.21 и Leduc 0.22, а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление турбореактивных двигателей представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга при неподвижности, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а следовательно, дешевизне и надёжности. Начиная с 1950-х годов, в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.
В СССР с 1954 по 1960 год в ОКБ-301 под руководством генерального конструктора С. А. Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше М = 3 и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть С. А. Лавочкина в 1960 году окончательно похоронила проект.
Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 «Оникс», П-270 «Москит».
Из истории развития реактивных двигателей
Так покоряли скорость
На 1940-1950-е годы пришелся бум развития авиационного моторостроения — появились и начали серийно использоваться на самолетах реактивные двигатели различных конструкций. Эти силовые установки на боевых самолетах обеспечивали повышенную маневренность и лучшее ускорение по сравнению с традиционными поршневыми двигателями, а также позволяли выполнять, пусть и кратковременные, полеты на скорости, превышающей скорость звука.
В 1950-х годах началась разработка новых боевых и разведывательных летательных аппаратов, способных безопасно для себя действовать в воздушном пространстве, охраняемом системами противовоздушной обороны противника. В частности, ставка делалась на скорость полета — считалось, что чем быстрее летит самолет, тем меньше шансов у зенитной ракеты его догнать.
Необходимость наращивать скорость потребовала поиска новых конструкторских решений. Дело в том, что уже существовавшие тогда воздушно-реактивные авиационные двигатели при всех возможных ухищрениях не могли обеспечить скорость полета больше 2–2,5 числа Маха.
Разработчики авиационной техники начали экспериментировать с другими двигателями. Наиболее очевидным вариантом оказался ракетный двигатель, не имеющий ограничений по скорости встречного воздушного потока, поскольку для сжигания топлива атмосферный кислород он не использует.
Такой двигатель способен обеспечивать высокие скорости полета. Например, американский экспериментальный самолет Bell X-1 уверенно развивал скорости полета, близкие к 2 числам Маха, а в 1953 году достиг скорости в 2,5 числа Маха на высоте 21,4 тысячи метров. В 1963 году ракетоплан X-15 развил гиперзвуковую скорость в 5,58 числа Маха.
Тем не менее, ракетные двигатели плохо подходили для создания серийных военных, главным образом разведывательных, самолетов. Дело в том, что они не могли обеспечить большую продолжительность полета, а учитывая политическую обстановку того времени, она была крайне желательна, поскольку СССР от США отделяет значительное расстояние.
Так исследователи начали работать над комбинированными двигателями, которые могли бы сочетать в себе свойства силовых установок разных классов.
Если упрощенно описывать работу такого двигателя, то она выглядела следующим образом: ракетная силовая установка сжигала топливо не полностью, после чего газовая струя с не сгоревшим топливом поступала в прямоточный двигатель, где тормозилась и сжималась. Там топливо дожигалось, и отработанные газы выходили из двигателя, создавая тягу.
Аналогичные проекты существовали и в США. В целом по теме комбинированных двигателей разработки велись по нескольким направлениям. Помимо ракетно-прямоточных создавались турбопрямоточные (газотурбинный и прямоточный контуры) и ракетно-турбинные (ракетный и газотурбинный контуры).
Некоторые проекты таких силовых установок предполагали, что они смогут обеспечить скорость полета больше 3 чисел Маха, а некоторые, работающие в том числе и на водороде, — больше 5 чисел Маха. К гиперзвуковой принято относить скорость больше 5 чисел Маха.
Преимущества и недостатки
Подведя итоги, можно выделить основные преимущества и недостатки ТВД. Преимуществами турбовинтовых двигателей являются:
— небольшой вес в сравнение с поршневыми моторами;
— экономичность и меньший расход топлива в сравнение с турбореактивными двигателями, что объясняется наличием воздушного винта, КПД которого порой достигает 86%.
Но при всех своих достоинствах ТВД не могут полностью заменить собой реактивные двигатели, ведь их конструкция не позволяет развивать большие скорости. Их скоростной предел составляет 750 км/час, тогда как современная авиация требует намного большего. Еще один минус – шум при работе винта, превышающий гранично допустимые значения, определенные Международной организацией гражданской авиации.
Таким образом, несмотря на высокий КПД и экономичность, использование турбовинтовых двигателей ограничено. В основном ими оснащаются самолеты, летающие с небольшой скоростью и на дальние расстояния, что позволяет значительно снизить стоимость пассажирских и грузовых перелетов. В этих случаях их использование полностью оправдано. Но в военной авиации ТВД практически не используются – здесь важны не экономия топлива, а скорость, маневренность и бесшумность, что вполне могут обеспечить турбореактивные двигатели. Вместе с тем в авиационной промышленности постоянно ведутся работы по созданию сверхзвуковых винтов, которые смогли бы преодолевать звуковой барьер без потерь КПД и «эффекта запирания». Возможно, со временем этим двигателям удастся вытеснить своих реактивных собратьев и занять их место в современном авиастроении. Пока же ТВД остаются пусть и не самыми мощными, но выносливыми и надежными «рабочими лошадками».
Устройство и принцип работы турбовинтового двигателя
Строение турбовинтового двигателя довольно простое. Он состоит из воздушного винта с редуктором, компрессора, камеры сгорания, турбины и выходного устройства – сопла. Компрессор нагнетает и сжимает воздух, направляя его в камеру сгорания, куда впрыскивается топливо. Горючая смесь, полученная при смешивании воздуха с топливом, воспламеняется, образуя газы с высокой потенциальной энергией, которые, расширяясь, поступают на лопасти турбины, вращая ее, а сама турбина вращает воздушный винт и компрессор. Энергия, не потраченная на вращение турбины, выходит в виде потока воздуха через сопло, образуя реактивную тягу, величина которой не более 10% от общей тяги мотора. Поскольку она незначительна по своей величине, ТВД не считается реактивным. Как видно, по своему строению и принципу работы турбовинтовой двигатель очень напоминает турбореактивный с той лишь разницей, что в первом случае выработанная полезная энергия идет на вращение винта, а во втором она полностью выходит в виде потока воздуха через сопло, образуя реактивную тягу.
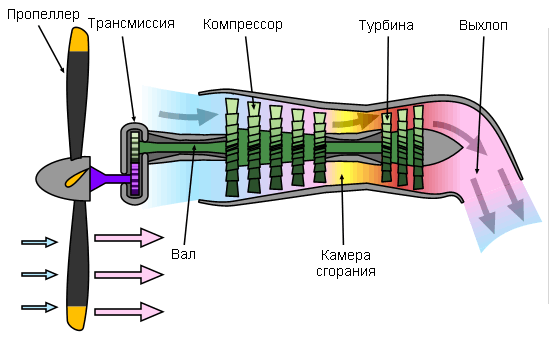
Строение турбовинтового двигателя
Рабочий вал
 Различают двухвальные и одновальные турбовинтовые двигатели. В одновальных ТВД турбина с компрессором и винт расположены на одном валу, тогда как в двухвальных между ними нет механической связи: турбина и компрессор закреплены на одном валу, а винт через редуктор – на другом. Во втором случае конструкция мотора включает в себя две турбины, связанные между собой не механически, а газодинамически: одна для компрессора, вторая для винта. Это более распространенный и эффективный вариант, который, несмотря на более сложную конструкцию, используется чаще. Такое решение позволяет использовать энергию двигателя без запуска винтов, что удобно в случаях, когда самолет находится на земле и нужно обеспечить выработку электроэнергии и подачу воздуха высокого давления.
Различают двухвальные и одновальные турбовинтовые двигатели. В одновальных ТВД турбина с компрессором и винт расположены на одном валу, тогда как в двухвальных между ними нет механической связи: турбина и компрессор закреплены на одном валу, а винт через редуктор – на другом. Во втором случае конструкция мотора включает в себя две турбины, связанные между собой не механически, а газодинамически: одна для компрессора, вторая для винта. Это более распространенный и эффективный вариант, который, несмотря на более сложную конструкцию, используется чаще. Такое решение позволяет использовать энергию двигателя без запуска винтов, что удобно в случаях, когда самолет находится на земле и нужно обеспечить выработку электроэнергии и подачу воздуха высокого давления.
Компрессор
Компрессор ТВД имеет ступенчатую конструкцию с числом ступеней в пределах 2-6, что позволяет воспринимать значительные перепады давления и температур при работе, регулировать и снижать обороты
Многоступенчатая конструкция также дает возможность снизить массу и размеры мотора, что немаловажно для авиационных двигателей, где на счету каждый грамм веса. Компрессор состоит из рабочех колес с лопатками и направляющего аппарата
Направляющий аппарат может быть как регулируемым (с поворачивающимися лопатками вокруг своей оси), так и не регулируемым.
Воздушный винт
 Воздушный винт создает необходимую тягу, но при этом скорость его вращения ограничена. Наиболее эффективно он работает на скорости 750-1500 об/мин, после чего КПД падает, а сам винт из движителя фактически превращается в тормоз. Это явление носит название «эффект запирания» и связано оно с тем, что отдельные части лопастей винта на высоких оборотах начинают двигаться со скоростью, превышающей скорость звука, что становится причиной его некорректной работы. Это же происходит, если увеличить диаметр лопастей, ведь чем они длиннее, тем больше линейная скорость на их концах.
Воздушный винт создает необходимую тягу, но при этом скорость его вращения ограничена. Наиболее эффективно он работает на скорости 750-1500 об/мин, после чего КПД падает, а сам винт из движителя фактически превращается в тормоз. Это явление носит название «эффект запирания» и связано оно с тем, что отдельные части лопастей винта на высоких оборотах начинают двигаться со скоростью, превышающей скорость звука, что становится причиной его некорректной работы. Это же происходит, если увеличить диаметр лопастей, ведь чем они длиннее, тем больше линейная скорость на их концах.
Турбина
 Турбина же развивает скорость до 20 000 об/мин, но винт на таких оборотах просто не сможет работать, поэтому он оснащается понижающим редуктором, уменьшающим скорость вращения и повышающим момент. Редукторы по своему строению могут отличаться, но их задача – понижение скорости вращения и увеличение момента – остается неизменной. Ограничение скорости вращения винта во многом ограничивает использование ТВД особенно в военной авиации, где важна скорость, но ученые и конструкторы ведут активную работу по созданию сверхзвукового двигателя, правда, пока их старания не увенчались успехом. Для увеличения тяги на некоторых моделях устанавливаются по два винта, которые в процессе работы вращаются в противоположные стороны, приводимые в движение одним редуктором. Примером такого двигателя является Д-27, который называют турбовинтовентиляторным. Он оснащен двумя винто-вентиляторами, закрепленными через редуктор на оси свободной турбины. Пока это единственный двигатель такого рода, который используется в гражданской авиации на самолетах АН-70, но его появление и успешное использование смогут стать настоящим прорывом в сфере улучшения эксплуатационных показателей ТВД.
Турбина же развивает скорость до 20 000 об/мин, но винт на таких оборотах просто не сможет работать, поэтому он оснащается понижающим редуктором, уменьшающим скорость вращения и повышающим момент. Редукторы по своему строению могут отличаться, но их задача – понижение скорости вращения и увеличение момента – остается неизменной. Ограничение скорости вращения винта во многом ограничивает использование ТВД особенно в военной авиации, где важна скорость, но ученые и конструкторы ведут активную работу по созданию сверхзвукового двигателя, правда, пока их старания не увенчались успехом. Для увеличения тяги на некоторых моделях устанавливаются по два винта, которые в процессе работы вращаются в противоположные стороны, приводимые в движение одним редуктором. Примером такого двигателя является Д-27, который называют турбовинтовентиляторным. Он оснащен двумя винто-вентиляторами, закрепленными через редуктор на оси свободной турбины. Пока это единственный двигатель такого рода, который используется в гражданской авиации на самолетах АН-70, но его появление и успешное использование смогут стать настоящим прорывом в сфере улучшения эксплуатационных показателей ТВД.
Область применения[править | править код]
ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости. Для достижения начальной скорости, при которой он становится эффективным, аппарат с этим двигателем нуждается во вспомогательном приводе, который может быть обеспечен, например, твердотопливным ракетным ускорителем, или самолётом-носителем (самолетом-разгонщиком), с которого запускается аппарат с ПВРД.
Неэффективность ПВРД на малых скоростях полёта делает его практически неприменимым на пилотируемых самолётах с неядерной двигательной системой, но для беспилотных, в том числе боевых (в частности, крылатых ракет), одноразового применения, летающих в диапазоне скоростей 2 < М < 5, благодаря своей простоте, дешевизне и надёжности, он предпочтителен. Также ПВРД используются на летающих мишенях. Основным конкурентом ПВРД в этой нише является ракетный двигатель.
Ядерный ПВРДправить | править код
Ядерный ПВРД «Плутон» (США)
Во второй половине 1950-х годов, в эпоху холодной войны, в США и СССР разрабатывались проекты ПВРД с ядерным реактором.
Источником энергии этих ПВРД (в отличие от остальных ВРД) является не химическая реакция горения топлива, а тепло, вырабатываемое ядерным реактором в камере нагрева рабочего тела. Воздух из входного устройства в таком ПВРД проходит через активную зону реактора, охлаждая его, нагревается сам до рабочей температуры (около 3000 К), а затем истекает из сопла со скоростью, сравнимой со скоростями истечения для самых совершенных химических ЖРД . Возможное назначения летательного аппарата с таким двигателем:
- межконтинентальная крылатая ракета-носитель ядерного заряда;
- одноступенчатый воздушно-космический самолёт.
В обеих странах были созданы компактные малоресурсные ядерные реакторы, которые вписывались в габариты большой ракеты. В США по программам исследований ядерного ПВРД «Pluto» и «Tory» в 1964 году были проведены стендовые огневые испытания ядерного прямоточного двигателя «Tory-IIC» (режим полной мощности 513 МВт в течение пяти минут с тягой 156 кН). Лётные испытания не проводились, программа была закрыта в июле 1964 года. Одна из причин закрытия программы — совершенствование конструкции баллистических ракет с химическими ракетными двигателями, которые вполне обеспечили решение боевых задач без применения схем с сравнительно дорогостоящими ядерными ПВРД.
Тем не менее, ядерный ПВРД перспективен как двигательная система для одноступенчатых воздушно-космических самолётов и скоростной межконтинентальной тяжёлой транспортной авиации. Этому способствует возможность создания ядерного ПВРД, способного работать на дозвуковых и нулевых скоростях полёта в режиме ракетного двигателя, используя бортовые запасы рабочего тела. То есть, например, воздушно-космический самолёт с ядерным ПВРД стартует (в том числе взлетает), подавая в двигатели рабочее тело из бортовых (или подвесных) баков и, уже достигнув скоростей от М = 1, переходит на использование атмосферного воздуха.
В России, по сделанному президентом В. В. Путиным в начале 2018 года заявлению, «состоялся успешный пуск крылатой ракеты с ядерной энергоустановкой».
Испытания ПВРД
В конце апреля 1944 года в тесном сотрудничестве НИИ авиации в Брауншвейге и научно-исследовательский институт аэродинамики (Aerodynamischen Versuchsanstalt) в Геттингене начали совместные исследования моделей. Целью этих исследований было установление окончательной формы силовой установки, а также конструкторские работы по созданию оптимальных форсунок и испарителя.
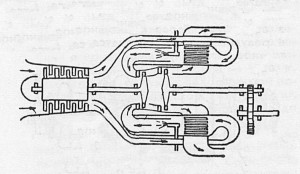
Конфигурация корпуса (трубы) силовой установки, соответствующая последним результатам аэродинамических исследований, была окончательно определена в середине июля 1944 года, а в конце месяца на заводе компании Focke-Wulf в Бад-Айльзене (Bad Eilsen) завершилось изготовление двух опытных образцов (Рис. 2).

Рис. 2. Форма силовой установки, подобранная после завершения испытаний в научно-исследовательском институте аэродинамики, Геттинген
Однако следующий шаг, предложенный доктором Пабстом – провести лётные испытания для изучения влияния ПВРД на летные характеристики и поведение самолета в воздухе – так и не был сделан. Хотя конструкторская документация по установке корпусов опытных ПВРД на законцовках крыла истребителя FW 190 была полностью разработана, испытания не состоялись из-за отказа поставить самолет для этих целей (Рис. 3).

Рис. 3. Схема размещения ПВРД на законцовках крыла истребителя FW 190A-10
Насколько быстро шла разработка корпуса ПВРД, настолько же проблемным оказалось создание работоспособного испарителя, в котором должно было испаряться тяжелое высококипящее топливо (каменноугольное масло ). Уже при первых принципиальных отработках возникли значительные проблемы с подачей необходимого количества топлива, которое должно было поступать в камеру сгорания в виде паров, со смесеобразованием, с регулировкой подачи топлива, установлением необходимого количества подаваемого топлива и поддержанием фронта пламени.
Сначала в компании Focke-Wulf рассчитывали завершить разработки в течение четырех месяцев, но вскоре стало понятно, что эти сроки иллюзорны и нереальны. В результате инженеры компании сконцентрировались на разработке камеры сгорания, которая могла бы работать без испарителя топлива.
В середине августа 1944 года была представлена первая работоспособная модель ПВРД. Эту силовую установку направили в Брауншвейгский НИИ авиации. Однако несмотря на то, что руководитель группы разработок (Chef der Amtsgruppe «Entwicklung») технического отдела подполковник Кнемайер (Oberstleutnant Knemeyer) в письме напомнил о необходимости провести испытания как можно быстрее, эти испытания камеры сгорания не были начаты. На это была серьезная причина: незадолго перед изготовлением первого работоспособного образца ПВРД бомбардировщики союзников нанесли удар по химическому комбинату Leuna-Werke, производившему необходимый для испытаний пропан. Завод был серьёзно поврежден и о быстром восстановлении производства пропана на нем не могло быть и речи.
После этого в середине сентября доктор Пабст предложил проводить испытания, используя в качестве топлива водород. Монтаж двухсот баллонов с водородом в испытательном центре Люфтваффе в Ораниенбурге (Oranienburg) растянулся на месяцы. Только в конце января 1945 года, когда было установлено всё необходимое для выполнения измерений оборудование и проведена сборка силовой установки, были выполнены измерения сопротивления обшивки неработающего ПВРД. В середине февраля стало возможным производить измерения величины тяги работающей силовой установки. При расходе воздуха 0,705 кг/с скорость газов на выходе из сопла составляла 352 м/с, что соответствовало расчетным данным. (Рис. 4).

Рис. 4. ПВРД, разработанный компанией Focke-Wulf
В декабре 1944 года по заказу верховного командования ВВС (степень срочности «DE») предусматривалось изготовить четыре предсерийных прямоточных воздушно-реактивных двигателя, которые можно было бы использовать на самолётах. Исследования в рамках этого заказа должны были вестись до конца августа 1945 года, но после того как войска противника заняли Брауншвейг и Бад-Айльзен, эти испытания прекратились.
Позднее, когда между союзниками по Антигитлеровской коалиции возникли разногласия, исследования, проводившиеся под руководством доктора Цобеля и доктора Пабста, были внимательно изучены. Союзники оценили их как новаторские и значительные. Согласно рассекреченным документам эти результаты использовались американскими и английскими научно-исследовательским институтами в качестве основы для ведущихся ими исследований. Захваченные союзниками материалы стали открыто публиковать только в 1955 году.
Основной этап
Изготавливая реактивный пульсирующий двигатель дома, помните, что трубы фиксированного диаметра легко сформировать при помощи большего аналога. Вполне реально операцию провести руками за счет рычажного принципа, после чего края заготовки обработать киянкой, загибая их до нужной кондиции. Желательно, чтобы концы при стыковании образовывали плоскость, что улучшит размещение сварного шва. Листы в трубу согнуть сложнее, потребуется листогиб или вальцы. Этот профессиональный инструмент найдется далеко не у каждого. В качестве альтернативы допускается использование тисов.
Важный и кропотливый момент – сварка тонкого листа из металла. Здесь потребуются специальные навыки, особенно если в процессе применяется ручная дуговая сварка. Новичкам лучше не пытаться экспериментировать (малейшая передержка электрода в одной точке приводит к прожиганию дыры). Кроме того, в район шва могут попасть пузырьки, что впоследствии гарантирует течь. Лучше всего провести шлифовку шва до минимальной толщины, что позволит увидеть «брак» невооруженным глазом сразу. Конические сегменты сгибают вручную, обжимают узкий конец заготовки вокруг трубы малого диаметра, делая большее усилие, чем на широкую часть.

Классы реактивных двигателей:
Все реактивные двигатели подразделяют на 2 класса:
- Воздушно-реактивные – тепловые двигатели, использующие энергию окисления воздуха, получаемого из атмосферы. В этих двигателях рабочее тело представлено смесью продуктов горения с остальными элементами отобранного воздуха.
- Ракетные – двигатели, которые на борту содержат все необходимые компоненты и способны работать даже в безвоздушном пространстве.
Прямоточный воздушно-реактивный двигатель – самый простой в классе ВРД по конструкции. Требуемое для работы устройства повышение давления образуется путем торможения встречного воздушного потока.

Рабочий процесс ПВРД можно кратко описать следующим образом:
Во входное устройство двигателя поступает воздух со скоростью полета, кинетическая его энергия преобразуется во внутреннюю, давление и температура воздуха повышаются. На входе в камеру сгорания и по всей длине проточной части наблюдается максимальное давление.
- Нагревание сжатого воздуха в камере сгорания происходит путем окисления подаваемого воздуха, при этом внутренняя энергия рабочего тела увеличивается.
- Далее поток сужается в сопле, рабочее тело достигает звуковой скорости, а вновь при расширении – сверхзвуковой. За счет того, что рабочее тело движется со скоростью, превышающей скорость встречного потока, внутри создается реактивная тяга.
В конструктивном плане ПВРД является предельно простым устройством. В составе двигателя есть камера сгорания, внутрь которой горючее поступает из топливных форсунок, а воздух – из диффузора. Камера сгорания заканчивается входом в сопло, которое является суживающейся-расширяющимся.
Развитие технологии смесевого твердого топлива повлекло за собой использование этого горючего в ПВРД. В камере сгорания располагается топливная шашка с центральным продольным каналом. Проходя по каналу, рабочее тело постепенно окисляет поверхность топлива и нагревается само. Применение твердого горючего еще более упрощает состоящую конструкцию двигателя: топливная система становится ненужной.
Смесевое топливо по своему составу в ПВРД отличается от применяемого в РДТТ. Если в ракетном двигателе большую часть состава топлива занимает окислитель, то в ПВРД он используется в небольших пропорциях для активирования процесса горения.
Наполнитель смесевого топлива ПВРД преимущественно состоит из мелкодисперсного порошка бериллия, магния или алюминия. Их теплота окисления существенно превосходит теплоту сгорания углеводородного горючего. В качестве примера твердотопливного ПВРД можно привести маршевый двигатель крылатой противокорабельной ракеты «П-270 Москит».

Тяга ПВРД зависит от скорости полета и определяется исходя из влияния нескольких факторов:
- Чем больше показатель скорости полета, тем большим будет расход воздуха, проходящего через тракт двигателя, соответственно, большее количество кислорода будет проникать в камеру сгорания, что увеличивает расход топлива, тепловую и механическую мощность мотора.
- Чем больше расход воздуха сквозь тракт двигателя, тем выше будет создаваемая мотором тяга. Однако существует некий предел, расход воздуха сквозь тракт мотора не может увеличиваться неограниченно.
- При возрастании скорости полета увеличивается уровень давления в камере сгорания. Вследствие этого увеличивается термический КПД двигателя.
- Чем больше разница между скоростью полета аппарата и скоростью прохождения реактивной струи, тем больше тяга двигателя.
Зависимость тяги прямоточного воздушно-реактивного двигателя от скорости полета можно представить следующим образом: до того момента, пока скорость полета намного ниже скорости прохождения реактивной струи, тяга будет увеличиваться вместе с ростом скорости полета. Когда скорость полета приближается к скорости реактивной струи, тяга начинает падать, миновав определенный максимум, при котором наблюдается оптимальная скорость полета.
В зависимости от скорости полета выделяют такие категории ПВРД:
- дозвуковые;
- сверхзвуковые;
- гиперзвуковые.

Каждая из групп имеет свои отличительные особенности конструкции.
Сверхзвуковые ПВРД
Сверхзвуковые ПВРД рассчитаны на осуществление полетов в диапазоне скоростей 1 < M < 5.
Торможение газового сверхзвукового потока всегда выполняется разрывно, при этом образуется ударная волна, которая называется скачком уплотнения. На дистанции ударной волны процесс сжатия газа не является изоэнтропийным. Следовательно, наблюдаются потери механической энергии, уровень увеличения давления в нем меньший, нежели в изоэнтропийном процессе. Чем мощнее будет скачок уплотнения, тем больше изменится скорость потока на фронте, соответственно, больше потери давления, иногда достигающие 50%.

Для того чтобы минимизировать потери давления, организуется сжатие не в одном, а нескольких скачках уплотнения с меньшей интенсивностью. После каждого из таких скачков наблюдается снижение скорости потока, которая остается сверхзвуковой. Это достигается, если фронт скачков расположен под углом к направлению скорости потока. Параметры потока в интервалах между скачками остаются постоянными.
В последнем скачке скорость достигает дозвукового показателя, дальнейшие процессы торможения и сжатия воздуха происходят непрерывно в канале диффузора.
Если входное устройство мотора расположено в области невозмущенного потока (например, впереди летательного аппарата на носовом окончании или на достаточном отдалении от фюзеляжа на крыльевой консоли), оно выполняется асимметричным и комплектуется центральным телом – острым длинным «конусом», выходящим из обечайки. Центральное тело предназначено для создания во встречном воздушном потоке косых скачков уплотнения, которые обеспечивают сжатие и торможение воздуха до момента его поступления в специальный канал входного устройства. Представленные входные устройства получили название устройств конического течения, воздух внутри них циркулирует, образуя коническую форму.
Центральное коническое тело может быть оснащено механическим приводом, который позволяет ему двигаться вдоль оси двигателя и оптимизировать торможение потока воздуха на разных скоростях полета. Данные входные устройства называются регулируемыми.
При фиксации двигателя под крылом или снизу фюзеляжа, то есть в области аэродинамического влияния элементов конструкции самолета, используют входные устройства плоской формы двухмерного течения. Они не оснащаются центральным телом и имеют поперечное прямоугольное сечение. Их еще называют устройствами смешанного или внутреннего сжатия, поскольку внешнее сжатие здесь имеет место только при скачках уплотнения, образующихся у передней кромки крыла или носового окончания летательного аппарата. Входные регулируемые устройства прямоугольного сечения способны менять положение клиньев внутри канала.
В сверхзвуковом скоростном диапазоне ПВРД более эффективен, нежели в дозвуковом. К примеру, на скорости полета М=3 степень увеличения давления составляет 36,7, что приближается к показателю турбореактивных двигателей, а расчетный идеальный КПД достигает 64,3 %. На практике эти показатели меньшие, но на скоростях в диапазоне М=3-5 СПВРД по эффективности превосходят все существующие типы ВРД.
При температуре невозмущенного воздушного потока 273°K и скорости самолета М=5 температура рабочего заторможенного тела равна 1638°К, при скорости М=6 — 2238°К, а в реальном полете с учетом скачков уплотнения и действия силы трения становится еще выше.
Дальнейшее нагревание рабочего тела является проблематичным из-за термической неустойчивости конструкционных материалов, входящих в состав двигателя. Поэтому предельной для СПВРД считается скорость, равная М=5.
Применение
Турбовентиляторные реактивные двигатели успешно используются на современных самолетах отечественного и зарубежного производства. Из «родных» стоит выделить ПС-90А и Д-18Т; из зарубежных — General Electric GE90, CFM56-5А/B, CFM56-5C2.
Сфера применения ТВРД очень широкая. Это наиболее востребованный вид авиационных реактивных двигателей на сегодняшний день, который значительно потеснил свой прототип – классический ТРД. Благодаря своей экономичности, он используется и в гражданской, и в военной авиации. Им оснащаются пассажирские и грузовые самолеты, летающие на дальние и средние расстояния, хотя раньше в целях экономии на них устанавливались ТВД. Сейчас же появилась возможность летать быстро и сравнительно недорого, и все благодаря ТВРД.

ПС-90 под крылом Sukhoi Superjet 100

Д-18Т и он же под крылом АН-124
Отклоняемый вектор тяги

Реактивные двигатели обладают соплами самых разнообразных конфигураций. Самыми передовыми считаются подвижные сопла, размещенные на двигателях, у которых имеется отклоняемый вектор тяги. Они могут сдавливаться и расширяться, а также отклоняться на существенные углы — так регулируются и направляются непосредственно реактивные потоки. Благодаря этому воздушные судна с двигателями, имеющими отклоняемый вектор тяги, становятся чрезвычайно маневренными, потому что процессы маневрирования происходят не только вследствие действий механизмов крыльев, но также прямо самими двигателями.

