«всепогодность и большая дальность»: в чём достоинства малогабаритных радиолокаторов российской армии
Содержание:
Принцип радиотелефонной связи
Первую передачу информации на расстоянии осуществил русский ученый Александр Степанович Попов (рис. 1).
Рис. 1. Александр Степанович Попов (Источник)
Для этой цели А.С. Попов использовал известную всем азбуку Морзе. Именно ему удалось осуществить радиосвязь, то есть передачу информации при помощи электромагнитных волн. Она заключалась в том, что при помощи точек и тире сообщалась некая информация.
Чем же отличается телефонная радиосвязь от радиосвязи?
Радиотелефонной связью мы называем передачу информации, речи, музыки на большие расстояния при помощи электромагнитных волн. Принцип радиотелефонной связи заключается в следующем: в передающей антенне создается высокочастотный переменный электрический ток, этот ток вокруг передающей антенны создает переменное электромагнитное поле, которое распространяется в виде электромагнитных волн. Такая волна, попадая на приемную антенну, возбуждает в приемной антенне ток той же частоты, что и был произведен при излучении, и таким образом осуществляется радиосвязь, то есть при помощи электромагнитных волн. Для того чтобы обеспечить такую связь, нужны специальные устройства. Во времена А.С. Попова и Генриха Герца, который впервые осуществил излучение электромагнитной волны и ее прием, источники электромагнитных колебаний были очень слабы, и поэтому на большие расстояния электромагнитная волна распространяться не могла. Тем не менее А.С. Попову удалось осуществить связь на расстоянии более 70 километров.
В наше время радиосвязь осуществляется по всему земному шару, даже за его пределами. Вопрос с производством высокочастотных колебаний был решен в 1913 году, когда был создан генератор незатухающих электромагнитных колебаний (рис. 2).
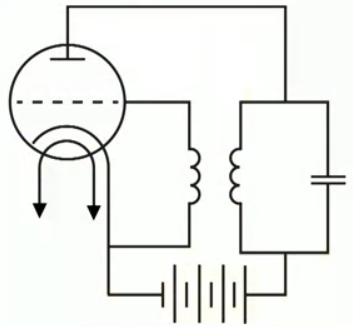
Рис. 2. Генератор незатухающих электромагнитных колебаний (Источник)
Главной частью генератора является трехэлектродная лампа – триод, которая состоит из трех частей: анод, сетка и катод. Вот такая лампа является основной частью любого генератора незатухающих колебаний.
Рассмотрим схему устройства передатчика электромагнитных волн или передающего устройства (рис. 3):
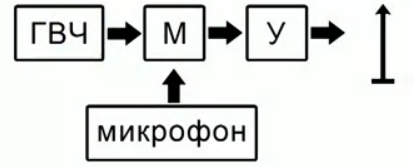
Рис. 3. Передатчик электромагнитных волн (Источник)
В первую очередь это генератор высокой частоты (ГВЧ), соединенный с модулятором (М), на который поступает звук от микрофона. В микрофоне механические колебания, звуковые колебания преобразуются в электрические колебания низкой частоты, и эти колебания от генератора высокой частоты и микрофона соединяются в модуляторе.
После усилителя (У) промодулированный сигнал поступает на передающую антенну, и уже этот сигнал выходит в эфир.
Слово «модуляция» означает «размеренность». Рассмотрим, как осуществляется модуляция в передающей части и из чего она состоит (рис. 4).
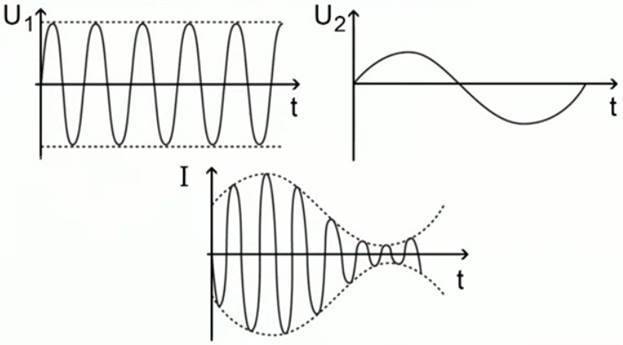
Рис. 4. Модуляция в передающей части (Источник)
На первой части рисунка изображены высокочастотные колебания, по вертикали расположено напряжение (U1), которое изменяется синусоидально и за очень маленький промежуток времени проходит очень много колебаний.
Вторая часть рисунка соответствует электрическим сигналам, которые поступают на модулятор от микрофона, это низкочастотные сигналы.
Когда в модуляции происходит объединение этих сигналов, мы наблюдаем высокочастотную составляющую, которая меняется по амплитуде в соответствии сигналам низких частот.
Этот процесс называется амплитудная модуляция.
Сегодня амплитудная модуляция – хорошо изученный и отработанный элемент, поэтому очень часто используется в радиосвязи, то есть когда мы слушаем радио, мы используем амплитудно-модулированный сигнал.
Существуют и другие способы модуляции: частотная модуляция или фазовая модуляция, они тоже нашли свое применение.
Связь с другими отраслями науки
Основным фактором, ограничивающим технические характеристики локаторов, является малая мощность принимаемого сигнала. При этом мощность принимаемого сигнала убывает как четвёртая степень дальности (то есть, чтобы увеличить дальность действия локатора в 10 раз нужно увеличить мощность передатчика в 10000 раз). Естественно, на этом пути быстро пришли к пределам, преодолеть которые было далеко не просто. Уже в самом начале развития был осознан тот факт, что имеет значение не сама мощность принимаемого сигнала, а его заметность на фоне шумов приёмника. Снижение шумов приёмника также было ограничено естественными шумами элементов приёмника, например тепловыми. Данный тупик был преодолён на пути усложнения методов обработки принятого сигнала и связанного с этим усложнения формы применяемых сигналов. Развитие радиолокации как научной отрасли знаний шло одновременно с развитием кибернетики и теории информации, и потребовались бы специальные исследования, чтобы решить, где именно были получены первые результаты. Следует отметить появление понятия сигнала, который позволил отвлечься от конкретных физических процессов в приёмнике, таких как напряжение и ток, и позволил решать стоящие проблемы как математическую задачу о поиске наилучших функциональных преобразованиях функций времени.
Одной из первых работ в этой области была работа В. А. Котельникова об оптимальном приёме сигнала, то есть наилучшем в условии шумов методе обработки сигнала. В результате было доказано, что качество приёма зависит не от мощности сигнала, а от его энергии, то есть произведения мощности на время, таким образом, появилась доказанная возможность увеличения дальности действия за счёт увеличения длительности сигналов, в пределе до непрерывного излучения. Значительным шагом вперед стало отчётливое применение в технике методов статистической теории решений (критерий Неймана-Пирсона) и принятие того факта, что исправное устройство может работать с определённой долей вероятности. Для того, чтобы радиолокационный сигнал при большой длительности позволял измерять дальность и скорость с высокой точностью, потребовались сложные сигналы, в отличие от простых радиолокационных импульсов, изменяющие какие-либо характеристики в процессе генерации. Так. сигналы с линейной частотной модуляцией изменяют частоту колебаний в течение одного импульса, сигналы с фазовой манипуляцией скачкообразно изменяют фазу сигнала, обычно на 180 градусов. При создании сложных сигналов было сформулировано понятие функции неопределённости сигнала, показывающей связь точности измерений дальности и скорости. Необходимость повышения точности измерения параметров стимулировало развитие различных методов фильтрации результатов измерений, например, методов оптимальной нелинейной фильтрации, которые явились обобщением фильтра Калмана на нелинейные задачи. В итоге всех этих разработок теоретическая радиолокация оформилась как самостоятельная сильно математизированная отрасль знаний, в которой значительную роль имеют формализованные методы синтеза, то есть проектирование ведётся в известной мере «на кончике пера».
С этим читают
Примечания
- . TheFreeDictionary.com. Дата обращения 30 декабря 2015.
- Translation Bureau. . Public Works and Government Services Canada (2013). Дата обращения 8 ноября 2013.
- McGraw-Hill dictionary of scientific and technical terms / Daniel N. Lapedes, editor in chief. Lapedes, Daniel N. New York ; Montreal : McGraw-Hill, 1976. , 1634, A26 p.
- , с. 13.
- .
- Angela Hind. . BBC News (5 февраля 2007).
- ↑ .
- ↑ Справочник по радиоэлектронным системам / под ред. Б. В. Кривицкого. — М.: Энергия, 1979. — Т. 2. — С. 75—206. — 368 с.
- , с. 15—17.
-
Слюсар, В.И. . Разделы 9.3 – 9.8 в книге «Широкополосные беспроводные сети передачи информации». / Вишневский В.М., Ляхов А.И., Портной С.Л., Шахнович И.В. – М.: Техносфера. – 2005. C. 498 – 569 (2005).
-
Слюсар, В.И. . Электроника: наука, технология, бизнес. – 2001. – № 3. C. 42 – 46. (2001).
- Слюсар, В.И. (недоступная ссылка). Специальная техника и вооружение. – Февраль, 2002. – № 1,2. С. 17 – 23. (2002). Дата обращения 7 августа 2017.
- В. Г. Дождиков, Ю. С. Лифанов, М. И. Салтан ; под ред. В. Г. Дождикова. Энциклопедический словарь по радиоэлектронике, оптоэлектронике и гидроакустике / В. Г. Дождиков. — Москва: Энергия, 2008. — С. 600. — 611 с. — ISBN 978-5-98420-026-4 (В пер.).
Радиолокационное оборудование
|
Блок-схема импульсной РЛС. |
Радиолокационное оборудование, предназначенное для измерения координат и параметров движения целей, использует принцип отражения, переизлучения электромагнитных волн от поверхности целей или излучения ответных сигналов.
К радиолокационному оборудованию относятся станции: панорамные, перехвата и прицеливания, управления бортовым оружием, управляемых ракет, предупреждения, а также радиовзрыватели и системы вторичной радиолокации.
Современная авиационная и ракетная техника широко использует радиолокационное оборудование различного назначения. Для защиты антенных устройств радиолокационной аппаратуры от аэродинамических нагрузок и атмосферных воздействий применяют антенные обтекатели. Форма, материал и конструкция стенки обтекателя должны обеспечить необходимые аэродинамические характеристики, крочно / сть и надежность в работе. Вместе с тем обтекатель не должен существенно препятствовать передаче и приему высокочастотных импульсов электромагнитной энергии.
|
Приборная термоОарокамера объемом 100 л о пультом управления.| Приборная термоОарокамера объемом. м. 1 — рабочее пространство камеры, 2 — воздухоохладитель, з — электроподогреватель, 4 — вентилятор, S — дверца, 6 — смотровой люк. |
Для испытания авиационных топливных систем и насосов, электрогенераторов, радиолокационного оборудования и силовых систем оборудуют камеры объемом 5 — 15 м3 и высотой 1800 мм.
Передающие линии и узлы сантиметровых волн обычно тяжелы, громоздки и при производстве радиолокационного оборудования или оборудования связи часто обходятся очень дорого.
|
Зависимость количества конденсаторов, пробитых в эксплуатации, от соотношения между фактическим рабочим и номинальным напряжением. |
Интересные результаты были получены в США при проверке надежности конденсаторов, используемых в радиолокационном оборудовании.
Стеклопластиковые конструкции, изготовленные методом намотки, благодаря удачному сочетанию механических и электрических свойств, постепенно находят применение для изготовления кожухов антенн коммуникационного, навигационного и радиолокационного оборудования.
Во всех крупных промышленных и административных центрах страны построены авиационные узлы, аэропорты, аэровокзалы, оснащенные современными ср дст-вами связи, радионавигационными и радиолокационными оборудованиями, имеющие все необходимые служ ы для создания максимальных удобств пассажирам, автоматизации обработки багажа, грузов и управления воздушным движением. Помимо перевозок пассажиров, возрастает роль воздушного транспорта в перевозках срочных и ценных грузов, скоропортящейся продукции, для обслуживания сельского хозяйства.
Силиконовые материалы со стеклово-локнистым наполнителем выдерживают многочасовое воздействие температуры порядка 300 — 500 С. Из таких материалов изготовляют, например, покрытия радиолокационного оборудования ракет.
Работа радиолокационной станции зависит не только от конструкции отдельных блоков, но также от согласованности работы в целом. В частности, передатчик, приемник, модулятор и антенный переключатель часто объединяются в общий высокочастотный блок, который располагается вблизи от антенны. Механическая конструкция такого блока зависит от его расположения. Самолетное оборудование изолируется и герметизируется в обтекаемом контейнере, причем из-за ограничений по габаритам и весу возникает необходимость использовать мини-атюризированную аппаратуру. Военное радиолокационное оборудование конструируется так, чтобы оно могло работать в тропических условиях, Имеется возможность проверять с помощью контрольных выводов отдельные цепи и узлы; кроме того, для защиты оборудования в случае отказа некоторых основных узлов имеется система релейной защиты. Для защиты от случайных внешних магнитных полей производится, например, экранировка железом Армко. При этом, конечно, все тепло, выделяющееся в оборудовании, должно отводиться. Требующийся теплообмен может быть достигнут с помощью радиатора, имеющего внутренние и внешние ребра, обдуваемые вентиляторами. На высокоскоростных самолетах, летающих на больших высотах, может потребоваться охлаждение аппаратуры с помощью холодильника.
Историческая справка
На способность радиоволн к отражению указывали великий физик Г. Герц и русский электротехник А.С. Попов еще в конце XIX века. Согласно патенту от 1904 года, первый радар создал немецкий инженер К. Хюльмайер. Прибор, названный им телемобилоскопом, использовался на судах, бороздивших Рейн. В связи с развитием авиационной техники применение радиолокации выглядело очень перспективным в качестве элемента противовоздушной обороны. Исследования в этой области велись передовыми специалистами многих стран мира.
В 1932 году основной принцип радиолокации описал в своих работах научный сотрудник ЛЭФИ (Ленинградского электрофизического института) Павел Кондратьевич Ощепков. Им же в сотрудничестве с коллегами Б.К. Шембель и В.В. Цимбалиным летом 1934 года был продемонстрирован опытный образец радиолокационной установки, обнаружившей цель на высоте 150 м при удалении 600 м. Дальнейшие работы по совершенствованию средств радиолокации сводились к увеличению дальности их действия и повышению точности определения местоположения цели.
Радар на борту
К идее использования радиолокационных средств на самолетах пришли несколько лет спустя после того, как появились первые наземные РЛС. Хотя в системах радионавигации и в приборах «слепой посадки» радиотехнические средства начали применяться уже с 1933 года.
В СССР именно наземная станция «Редут» явилась прототипом первой бортовой радиолокационной станции (БРЛС). Одной из основных проблем стало размещение аппаратуры на самолете – комплект станции с источниками питания и кабелями должен был весить примерно 500 кг. На одноместном истребителе того времени разместить такую аппаратуру было нереально. И выход был найден – разместить станцию было решено не на одноместном самолете, а на двухместном Пе-2.
РЛС «Коршун» на МиГ-17П
Первая отечественная бортовая радиолокационная станция была названа «Гнейс-2», и в июне 1943 года она была принята на вооружение. К концу 1944 года было выпущено более 230 станций «Гнейс-2».
А в победном 1945 году началось серийное производство самолетной радиолокационной станции «Гнейс-5с». Дальность обнаружения цели достигала 7 км. Но главной новинкой этой модификации было то, что начиная с дальности 1,5 км данные воздушной обстановки дублировались на специальном индикаторе, установленном в кабине летчика. Это позволяло пилоту самостоятельно выводить самолет в атаку.
Дальнейшее развитие бортовых РЛС было связано с появлением реактивной авиации. Обнаружить самолеты и крылатые ракеты врага помогали такие установки, как «Изумруд», «Сокол» и «Сапфир» в различных модификациях.
Первые советские радары
В 1920-е годы ученые в СССР создали импульсную радиолокационную установку и смогли с помощью отраженного радиосигнала измерить расстояние до ионосферы. В 1925 году физики Введенский, Симанов, Халезов и Аренберг указали на возможность применения для радиолокации ультракоротких радиоволн. А в 1934 году в Ленинграде начались первые полноценные опыты с аппаратурой радиообнаружения – в январе радиолокационным методом на расстоянии 600 метров был найден самолет, летящий на высоте 150 метров.
Оборудование было создано в Центральной радиолаборатории группой Ю.К. Коровина при поддержке Ленинградского электротехнического института. Руководил экспериментом военный инженер М.М. Лобанов, который сыграл ключевую роль в становлении радиолокационного направления в промышленности. В том же 1934 году на Ленинградском радиозаводе были выпущены опытные образцы радиолокационных станций (РЛС) «Вега» и «Конус» для системы радиообнаружения самолетов «Электровизор» ученого П.К. Ощепкова. Таким образом, 1934 год можно считать годом рождения первого отечественного радара.
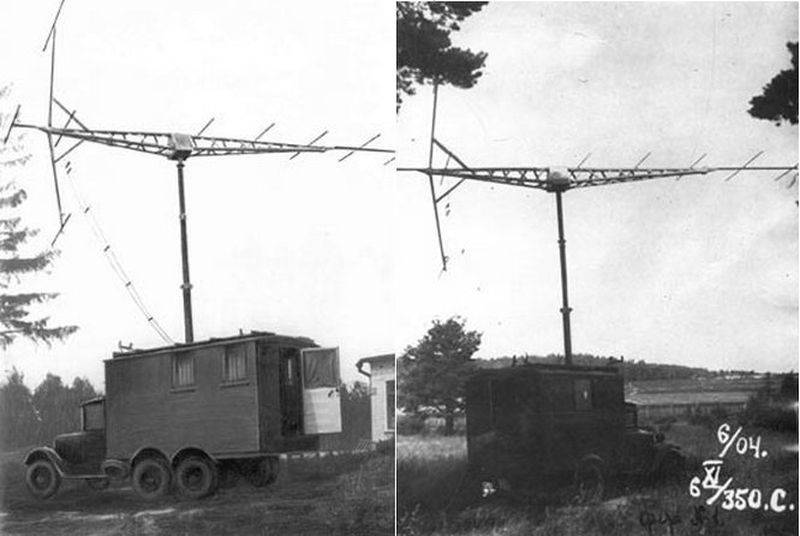
РЛС дальнего обнаружения «РУС-2»
В 1938 году начинается серийное производство РЛС РУС-1 и РУС-2 «Редут», которые станут основой противовоздушной обороны в начале Великой Отечественной войны. Благодаря установленной на крейсере «Молотов» радиолокационной станции были отражены первые атаки немецких бомбардировщиков на Севастополь 22 июня 1941 года. А месяц спустя комплекс РУС-2, расположенный в 100 км от Москвы, обнаружил 200 самолетов, летящих бомбить столицу. Тогда атака была отражена, немцы развернулись, потеряв 22 машины.
В работе над первыми станциями РУС-1 принимал участие выдающийся физик А.А. Пистолькорс, создатель научной школы радиоэлектроники. Станция РУС-2 «Редут» выпускалась на заводе №339 и стала самой массовой РЛС времен войны.
Как «искусственный интеллект» ищет цель
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора.
Представим структурную схему гипотетической РЛС, в основу работы которой положен активный метод радиолокации при импульсном режиме излучения, то есть с использованием импульсных зондирующих сигналов в виде чередующихся во времени отрезков колебаний.
На данной структурной схеме можно представить шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, – передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик, или передающий тракт РЛС, обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему. Антенна в импульсном радиолокаторе работает как на передачу, так и на прием. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.
Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.
Необходимо заметить, совокупность алгоритмов, закладываемых в систему обработки, определяет возможности РЛС и качество решения задач радиолокационного приема радиолокатором. Часто говорят, что система обработки определяет «интеллект» РЛС. Хотя термин «интеллект», конечно же, применим только к человеку. Однако современные технологии позволяют создавать технические системы, например, роботы, обладающие искусственным интеллектом. Современный уровень разработки алгоритмов в РЛС таков, что термин «искусственный интеллект» вполне применим и к современным радиолокаторам.
Подробнее о радиолокационных системах, их применении и перспективах читайте в книге «Радиолокация для всех» (В.С. Верба, К.Ю. Гаврилов, А.Р. Ильчук, Б.Г. Татарский, А.А. Филатов / под редакцией члена-корреспондента РАН В.С. Вербы).
Классификация
Выделяют два вида радиолокации:
- Пассивная радиолокация основана на приёме собственного излучения объекта;
- При активной радиолокации радар излучает свой собственный зондирующий сигнал и принимает его отражённым от цели. В зависимости от параметров принятого сигнала определяются характеристики цели.
Активная радиолокация бывает двух видов:
Активная радиолокация с пассивным ответом
- С активным ответом — на объекте предполагается наличие радиопередатчика (ответчика), который излучает радиоволны в ответ на принятый сигнал. Активный ответ применяется для опознавания объектов (свой-чужой), дистанционного управления, а также для получения от них дополнительной информации (например, количество топлива, тип объекта и т. д.);
- С пассивным ответом — запросный сигнал отражается от объекта и воспринимается в пункте приёма как ответный.
Для просмотра окружающего пространства РЛС использует различные способы обзора за счёт перемещения направленного луча антенны РЛС:
- круговой;
- секторный;
- обзор по винтовой линии;
- конический;
- по спирали;
- «V» обзор;
- линейный (самолёты ДРЛО типа Ан-71 и А-50 (Россия) или американские с системой Авакс).
В соответствии с видом излучения РЛС делятся на:
- РЛС непрерывного излучения;
- Импульсные РЛС.
«Крестные отцы» радара
Как и в случае со многими другими изобретениями, дату точного создания радара и имя его создателя зафиксировать сложно. В первой половине XX века ученые ведущих стран двигались параллельными путями, приходя к тем или иным решениям иногда практически одновременно. А появление таких сложных устройств, как радар, всегда является результатом работы многих людей и коллективов. Однако историки едины во мнении, что приближающаяся Вторая мировая война стала своего рода ускорителем для многих ключевых технологий XX века, в том числе и для радиолокации.
Теоретические основы для радиообнаружения объектов были заложены еще в конце XIX века, но для их практического воплощения потребовались еще долгие годы и изобретение большого количества вспомогательных для радиолокатора устройств и технологий. За пальму первенства в создании радара в условиях секретности боролись технологические лидеры – Великобритания, Германия, США, Франция и СССР.
Еще в 1886 году немецкий физик Генрих Герц обнаружил, что радиоволны способны отражаться телами. А в 1897 году «отец радио» Александр Попов при испытаниях радиоприемника поймал радиоволны, отраженные от металла корабля, попавшего между передатчиком и приемником. В 1900 году Никола Тесла предположил, что объекты на земле и в воздухе можно находить с помощью отраженных электромагнитных волн.
Виды радиолокации
Природа электромагнитного излучения цели позволяет говорить о нескольких видах радиолокации:
- Пассивная радиолокация исследует собственное излучение (тепловое, электромагнитное и т.п.), которое генерирует цели (ракеты, самолеты, космические объекты).
- Активная с активным ответом осуществляется в случае, если объект оборудован собственным передатчиком и взаимодействие с ним происходит по алгори.
- Активная с пассивным ответом предполагает исследование вторичного (отраженного) радиосигнала. Радиолокационная станция в этом случае состоит из передатчика и приемника.
- Полуактивная радиолокация — это частный случай активной, в случае когда приемник отраженного излучения расположен вне РЛС (например, является конструктивным элементом самонаводящейся ракеты).
Каждому виду свойственны свои достоинства и недостатки.


